Como empezar con ROS y Rust🔗
Si comenzar con ROS ya tiene algunas dificultades porque como se dice
vulgarmente tienen que estar todos los patitos en fila(CMakes, package.xml,
dependencias, workpace de catkin, ...etc) entonces comenzar con ROS y Rust aun
mas porque ni bien empezas te preguntas pero como integro mi nodo de Rust(hecho
con cargo) a un projecto de catkin(que usa CMake)???
Bueno no te preocupes hice una herramienta:
que te genera los nodos de ROS hechos
con Rust(hecho con cargo) y que se comporta como un nodo "normal" de otro
lenguaje como python o Cpp, osea genera los nodos y todos los archivos que
se necesitan para que compilen con CMake
La herramienta se instala como un subcommand de cargo haciendo simplemente:
cargo install ros-project-generator
Una vez instalado solo necesitamos un archivo de configuracion config.yaml en
nuestro workspace de catkin como este:
# define a name
project_name: "navigation-robot"
# define a version
version: 0.0.1
# define the packages names
nodes:
- listener
- talker
Donde se definen el nombre del conjunto de nodos(project_name), la version y
la lista de nodos que queremos crear. Luego solo hacemos(siempre en la carpeta
donde esta el archivo de configuracion):
cargo ros-project-generator
Si todo salio bien vamos a obtener un mensaje como:
navigation-robot project generated!!!
Ahora que tenemos generados los nodos, deberian aparecer dentro de la carpeta
src en este caso como generamos dos nodos nos deberian aparecer listener y
talker
Ahora para completar este hola mundo de ROS deberiamos hacer que el nodo talker
publique "Hola mundo" en un topic que le asignemos por ejemplo "chatter"
Para ello necesitamos las siguientes lineas de codigo:
use env_logger;
use rosrust;
fn main() {
env_logger::init();
// Initialize node
rosrust::init("talker");
// Create publisher
let chatter_pub = rosrust::publish("chatter", 2).unwrap();
let log_names = rosrust::param("~log_names").unwrap().get().unwrap_or(false);
let mut count = 0;
// Create object that maintains 10Hz between sleep requests
let rate = rosrust::rate(10.0);
// Breaks when a shutdown signal is sent
while rosrust::is_ok() {
// Create string message
let mut msg = rosrust_msg::std_msgs::String::default();
msg.data = format!("hello world from rosrust {}", count);
// Log event
rosrust::ros_info!("Publishing: {}", msg.data);
// Send string message to topic via publisher
chatter_pub.send(msg).unwrap();
if log_names {
rosrust::ros_info!("Subscriber names: {:?}", chatter_pub.subscriber_names());
}
// Sleep to maintain 10Hz rate
rate.sleep();
count += 1;
}
}
Luego para el nodo listener debemos hacer que el mismo se subscriba al topic
que esta publicando el nodo anterior y asi completar este "Hola mundo"
use env_logger;
use rosrust;
fn main() {
env_logger::init();
// Initialize node
rosrust::init("listener");
// Create subscriber
// The subscriber is stopped when the returned object is destroyed
let subscriber_info = rosrust::subscribe("chatter", 2, |v: rosrust_msg::std_msgs::String| {
// Callback for handling received messages
rosrust::ros_info!("Received: {}", v.data);
})
.unwrap();
let log_names = rosrust::param("~log_names").unwrap().get().unwrap_or(false);
if log_names {
let rate = rosrust::rate(1.0);
while rosrust::is_ok() {
rosrust::ros_info!("Publisher uris: {:?}", subscriber_info.publisher_uris());
rate.sleep();
}
} else {
// Block the thread until a shutdown signal is received
rosrust::spin();
}
}
Si todo salio bien vamos a poder compilar nuestros nodos con el comando de siempre
que es(asumiendo que estamos usando catkin)
catkin_make
Si todo ha compilado sin errores tenemos ahora entonces los ejecutables de cada uno de los nodos disponibles para que podamos ejecutarlos, osea que podemos hacer
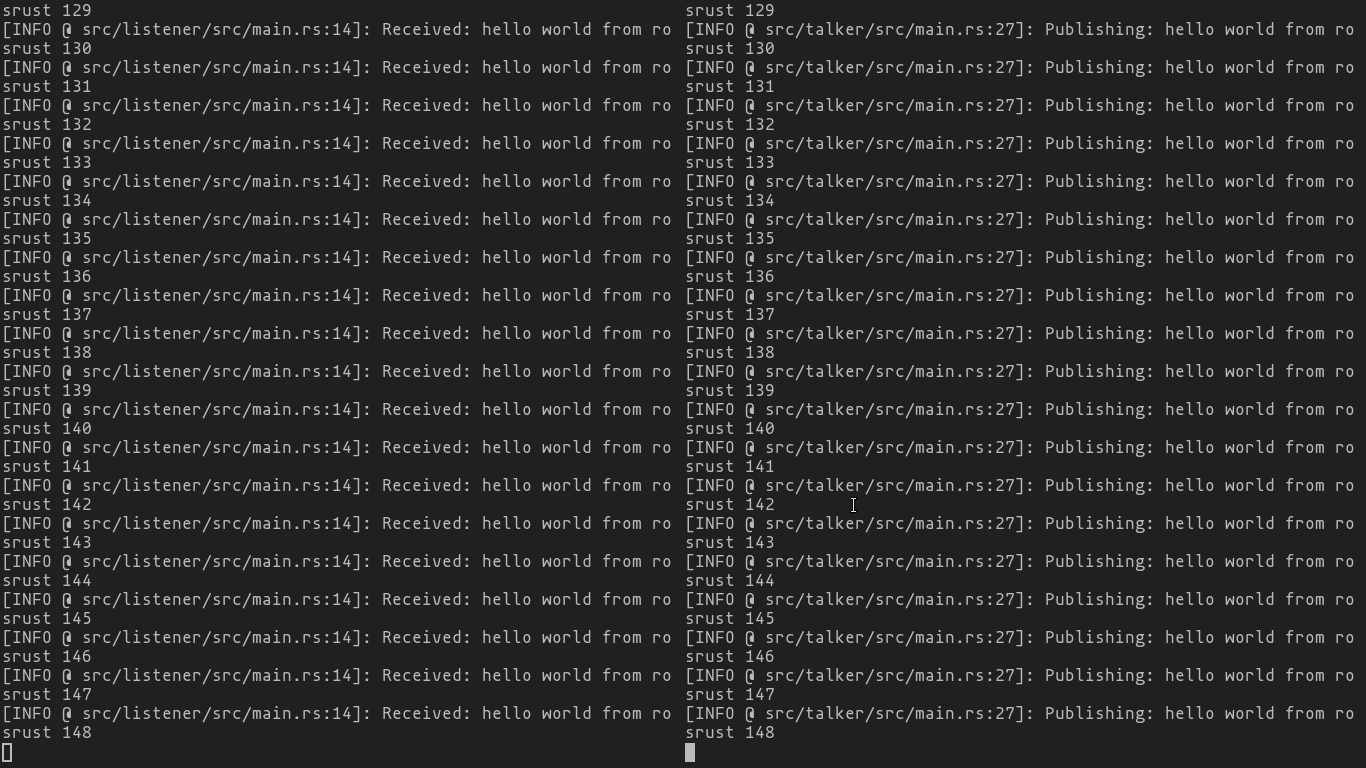
rosrun listener listener
y en otra terminal el otro nodo:
rosrun talker talker
Para obtener nuestro preciado Hello World!!!